





The desired batch sizes in a given period of time are taken into account in the development of the robot solution. (Photo credits: Emag)
Production solutions using robotic automation are on the rise. With robotic assistance, a fast and unattended flow of parts can be established within a machine shop, reducing unit production costs and increasing production reliability and quality.
To that end, Emag links its vertical turning pick-up machine technology with highly individual robot solutions designed within the requirements of the workpiece and the production process.



“Overall, it is safe to say that more and more robotic solutions are being used on our machines,” explains Jürgen Maier, Emag head of business unit turning. “After all, we have a large number of machines that already have internal automation based on pick-up technology. Consequently, we can integrate these solutions via robots into integrated production systems relatively easily and establish a smooth flow of parts at a single location.
“The focus is always on the requirements of the workpiece and the associated production process,” he continues. “Decisive questions here are, for example, what batch sizes are to be produced in a given period of time and how autonomously the solution should operate. In any case, we are very flexible and adapt in many ways to the existing production environment or space conditions.”
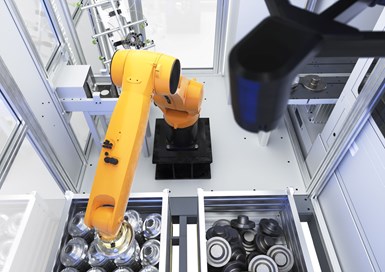
In bin picking systems, the workpieces are in random positions. With the help of a 3D sensor system, the robot not only picks the components, but also correctly recognizes and aligns them and feeds them to the next processing step.
Automated part-feeding options include using infeed/outfeed conveyor belts, palletizers, drawers or bin picking. With the help of these systems, the robot “operates” itself when it picks up or finishes placing new components. That said, each solution has different strengths.
For example, belt or hinge conveyors can be a good option when the flow of parts needs to be smooth from an upstream production solution to the machine tool. The robot can then simply pick up the components from the belt and deposit them again later, with the belts arranged in different configurations depending on the space situation or the desired part flow. Pneumatic stoppers ensure that the components are separated, and it is also possible to detect the workpiece alignment on the belt using a camera.
A highly flexible alternative to this are bin picking systems. Here, the workpieces in a bin are positioned randomly, and the robot arm not only picks the components with the aid of a 3D sensor system, but also correctly recognizes, aligns and feeds them to the next processing step. The system can be used flexibly and configured for many applications.
In contrast, the use of palletizers presupposes an “orderly” start. In this case, the system is loaded and unloaded via a blister cart, for example. It contains boxes stacked on top of each other with corresponding mold nests containing the components (a relatively large quantity per cart, which an operator simply pushes into a defined position from which the robot can access). The cart with finished parts is in a different position.
“One of the things that matters in this kind of solution is that you relate the cycle time of the Emag machine and the desired man-hours at the machine,” Maier says. “So if the machining cycle within the machine is only a few seconds and at the same time you are aiming for minimum operator effort at the machine, this solution might not be suitable because the carriages would then have to be replaced too frequently. But these are precisely the calculations that we carry out for every robot solution and advise the customer accordingly.”
A drawer system is an alternate variant. The workpieces are located in pneumatically movable drawers, which are quickly loaded by blister systems. In this case, three of these drawers are arranged one above the other in a cabinet, allowing a larger number of pieces to be stacked and processed (without intermediate operator intervention) often in a small footprint. Incidentally, loading and unloading of the drawers takes place without interrupting the process — the robot simply continues to work on a compartmentalized drawer.

With the drawer system, the workpieces are provided to the robot on different levels. While the drawers are being loaded, the robot in the cell supplies the machine with workpieces.
Regardless of the robotic automation process, Emag offers a range of additional options that can be applied to each type of robotic part-handling system. For example, it is possible to integrate statistical process control (SPC) including a measuring station. Here, individual components are regularly ejected, measured and reintroduced for quality assurance. It is also possible to place optical control systems with cameras, a gripper station for processing a wide range of workpieces, small washing and cleaning stations, deburring systems and laser or engraving stations within the robot cell. The respective solution is then also controlled by the robot. The result is a continuous flow of parts across different technologies.
Emag uses computer-based simulations when planning automation cells to check factors such as cycle time, robot accessibility, material flow in large production lines and more. Virtual commissioning — that is, testing planning data on a virtual machine — is similarly important. In this way, unforeseen errors can be detected and eliminated at an early stage of development. What’s more, actual commissioning is faster later on.








Related Content

In-Machine Probing Possibilities for VTLs
A manufacturer of vertical turning centers uses a “push/pull” optoelectronic probe with custom bracket to enable its machines to perform effective, in-process measurement of shafts and related automotive components.
Read More
PMTS 2023 Product Preview: High-Volume Turning
Learn about some of the latest high-volume turning solutions that will be on display at PMTS 2023.
Read More
An Automated Answer for Machining Ball Pins
This new vertical turning center with measurement and robotic automation processes is able to produce vehicle ball joint ball pins in 7 seconds.
Read More
Mazak Horizontal Turning Center Enables Versatile Machining
The QT-Ez 8MSY horizontal turning machine integrates seamlessly with bar feeders and robots, and accepts many additional options to tailor it to the needs of any shop.
Read MoreRead Next

5 Aspects of PMTS I Appreciate
The three-day edition of the 2025 Precision Machining Technology Show kicks off at the start of April. I’ll be there, and here are some reasons why.
Read More
A Tooling Workshop Worth a Visit
Marubeni Citizen-Cincom’s tooling and accessory workshop offers a chance to learn more about ancillary devices that can boost machining efficiency and capability.
Read More
Do You Have Single Points of Failure?
Plans need to be in place before a catastrophic event occurs.
Read More